| Содержание |
Часть I: Теория
[Глава 1: Как движутся ИСЗ?]
[Глава 2: Какие орбиты и ИСЗ бывают?]
Часть II: Практика
[Глава 3: Подготовка к наблюдениям]
[Глава 4: О времени]
- Самое главное в наблюдении ИСЗ
- § 1. Синхронизация часов
- п.1. Использование NTP-серверов точного времени сети INTERNET
- п.2. Использование радиосигналов точного времени РВМ
- п.3. Использование GPS-приёмника
- Использование часов GPS-приёмника
- Использование данных протокола NMEA
- Использование GPS-приёмника с 1PPS-сигналами
- п.4. Контроль точности синхронизации системных часов ПК
- § 2. Точность фиксаций моментов начала и конца экспозиции
- Звуковая фиксация срабатывания затвора
- Использование разъёма фотовспышки DSLR-камер
- Использование 1PPS-сигналов при видеосъёмке
- Выводы
[Глава 5: Что и как наблюдать?]
[Приложения]
[Использованные источники]
[Полезные ресурсы сети INTERNET]
Глава 4: О времени
В этой главе мы рассмотрим вопрос об определении точных моментов времени при наблюдении ИСЗ.
Самое главное в наблюдении ИСЗ
Для начала несколько слов о том, почему вопросу времени при наблюдениях ИСЗ посвящена целая глава. При наблюдении тех или иных спутниковых явлений (определение орбиты ИСЗ, съёмка транзитов, наблюдение вспышек и т.д.) мы чаще всего фиксируем место на небе, где происходит данное событие и время, когда оно происходит. Знание времени события позволяет отождествить спутник, оценить развитие события во времени и построить прогноз на последующие события. При разных видах наблюдений требуется разная точность времени. Чаще всего любителям астрономии достаточно знать время с точностью до минуты, а в отдельных, редких случаях - до секунды. Наблюдателям ИСЗ необходимо знать и фиксировать время с точностью от нескольких секунд до их долей. При этом нужно понимать, что существуют две основные проблемы, связанные со временем, решать которые приходится при наблюдениях:
- Точное определение моментов времени - нужно знать, во сколько произошло данное событие и сколько оно длилось. Эта задача получила жаргонное название "проблема таймингов". Тайминг (от англ. timeing) - определение точных моментов времени.
- Привязка тайминга к точному времени - важно не только определить, когда было событие, но и знать, с какой точностью момент времени, нами отмеченный, привязан к точному времени. При наблюдении ИСЗ чаще всего моменты времени фиксируют по всемирному времени (UTC, см. ниже). Знание того, с какой точностью наши часы идут синхронно со всемирным временем очень важно. Для её решения нужно получить и хранить точное время, к которому осуществляется привязка.
Сразу же нужно отметить, что вопрос точности фиксации моментов времени очень важен при наблюдении ИСЗ - можно сказать, что это одна из самых важных задач при подобных наблюдениях. И решение этой задачи не такое простое, как может показаться на первый взгляд...
[Вверх]
§ 1. Синхронизация часов
Как было отмечено выше, чтобы осуществить привязку моментов времени к точному времени, его нужно получить и хранить. Любительскими средствами это можно сделать несколькими путями.
п.1. Использование NTP-серверов точного времени сети INTERNET
Одним из наиболее простых способов получения точного времени является синхронизация системных часов персонального компьютера (ПК) с серверами точного времени – т.н. NTP-серверами, передающими информацию о точном времени по протоколу NTP [1]. При этом учитывается задержка по времени, связанная с прохождением сигналов по сети INTERNET. По запросу сервер высылает сообщение, включающее текущие показания часов, или "отметку времени" (timestamp). Клиент записывает собственную отметку времени в момент прибытия сообщения сервера. Для достижения максимальной точности клиенту необходимо измерить задержку распространения ответа "сервер-клиент" и таким образом выяснить полную величину смещения показаний часов относительно часов сервера. Поскольку невозможно определить величину задержки распространения в одну сторону, протокол измеряет общую "транспортную" задержку ("клиент - сервер" + "сервер - клиент") и предполагает, что время распространения в одну и другую сторону одинаково [2]. Структура NTP-пакета данных приведена в "Приложении А".
Для синхронизации ПК удобно использовать бесплатное ПО "Dimension 4" [3] компании "Thinking Man Software". После инсталляции программы откроется основное окно программы, в котором нужно выбрать из списка интересующий NTP-сервер и выбрать частоту синхронизаций (см. рис 1).
 |
Отдельно стоит остановиться на выборе NTP-сервера. Из соображений максимальной точности следует выбирать серверы т.н. "первого страта" [4], которые синхронизируются с атомными часами. Если в списке интересующий NTP-сервер отсутствует, его можно добавить вручную – нажав кнопку "Add" и заполнив необходимы пункты (Server – адрес web-сервера, Location – его местоположение, Protocol – протокол передачи точного времени, Notes – замечания). В блоке "How Often" следует указать, как часто производить запрос точного времени. Список доступных NTP-серверов первого страта довольно велик, некоторые приведены в [5].
Помимо выбора сервера максимальной точности следует также выбирать территориально ближайший сервер. Для Беларуси, например, это могут быть польские, российские, прибалтийские или украинские серверы. Самым ближайшим является сервер Белорусского государственного института метрологии (БелГИМ) [6].
Проверить стабильность прихода сигналов от NTP-сервера можно при помощи команды PING. Для этого необходимо запустить консольную оболочку DOS ("Пуск" - "Выполнить" - "cmd"). Затем в консоле набрать команду:
После этого будет выполнено 10 запросов и результат представлен в консольном окне (см. рис. 2).
 |
[Вверх]
Для определения как длительности задержки, так и стабильности этой длительности, нами были опрошены три NTP-сервера – nist1.symmetricom.com (США), vega.cbk.poznan.pl (Польша), www.belgim.by (Беларусь). Гистограммы распределения длительностей задержек обращений к серверам по 1000 обращениям для каждого сервера приведены на рис. 3. Для связи с сетью INTERNET использовалось ADSL-соединение. Наиболее важным является стабильность задержки, а не её значение, т.к. задержка учитывается самим протоколом NTP. Но если она будет нестабильной, то системные часы ПК будут синхронизироваться также нестабильно. Как видно из рис. 3, сервер nist1.symmetricom.com имеет большую длительность задержки и значительный "хвост" в распределении. Сервер www.belgim.by имеет минимальную задержку, не имеет "хвоста", величина разброса длительности задержки составляет 2 мс. Сервер vega.cbk.poznan.pl имеет незначительный "хвост" в распределении, подавляющее большинство задержек не превышает диапазона 99-100 мс.
 |
В целом, любой из этих серверов можно использовать для синхронизации системных часов ПК. Следует лишь иметь ввиду, что сервер nist1.symmetricom.com очень популярен и в дневное для США время (ночью в Европе) может быть сильно перегружен, что скажется на стабильности задержки сигналов.
Рассмотрим проблему синхронизации системных часов с помощь программы "Dimension 4" более подробно. Как видно, системные часы можно довольно точно синхронизировать (проверка точности синхронизации описана ниже). Дальше стоит задача хранения полученного точного времени. Следует сразу отметить, что персональный компьютер плохо справляется с этой функцией.
За историей синхронизации можно следить, периодически обращаясь к кнопке "History" – после её нажатия появляется окно с графиком, показывающим отклонение показаний системных часов от точного времени, получаемого от NTP-сервера как функция времени (см. рис. 4). В самом начале графика была произведена короткая синхронизация, когда точность отклонения последующих синхронизаций каждые 10 с не превышали 0,001 с (участок 1). Затем ПК был выключен на 9 часов. За это время системные часы "ушли" на +0,335 с (участок 2). Затем была проведена синхронизация в течении 5 часов (участок 3). На графике видно, что в процессе работы ПК синхронизация иногда нарушалась – из-за работы сторонних приложений синхронизация системных часов ПК происходила с запаздыванием или опережением. Из этого факта следует важное замечание – при синхронизации системных часов нужно закрыть все сторонние программы, чтобы они не мешали синхронизации системных часов. После 5 часов работы ПК он был выключен, а затем через 3,5 часа включен вновь. Как видно, системные часы "опоздали" на -0,472 с (участок 4). Как видно, системные часы ПК могут как "спешить", так и "опаздывать", причём уход времени не всегда одинаков – для участка 1-2 на рис. 4 уход времени составляет +1·10-5 секунды за секунду, для участка 3-4 уход равен -4·10-5 секунды за секунду (при +21° С).
 |
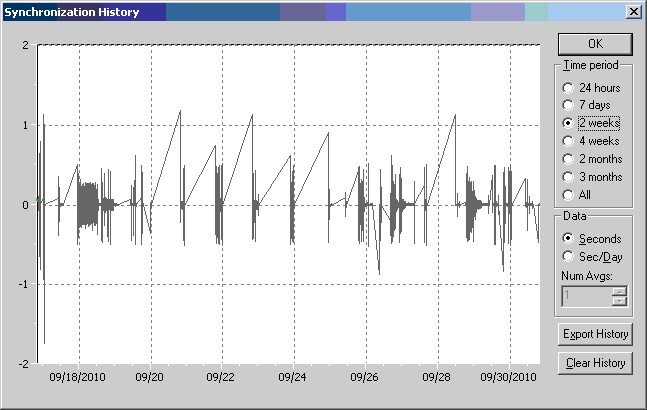
В целом, уход времени не превышает 0,0001 с за одну секунду. Следовательно, если нужно синхронизировать внешние по отношению к системным часам часы, то нужно принимать во внимание, что через 10 минут уход времени может составить 0,05 с. На рис. 5 представлен график истории синхронизации системных часов ПК за две недели. Величину ухода системных часов нужно проверять для каждого ПК отдельно.
 |
[Вверх]
Вышесказанное позволяет сделать вывод о том, что сам по себе ПК не может быть надёжным хранителем точного времени – он может лишь выступать как источник точного времени в довольно ограниченный (5-10 минут) промежуток времени. Остаётся лишь убедиться, что синхронизация системных часов ПК с сервером NTP имеет достаточную точность и определить ошибку рассинхронизации (см. ниже).
Теперь остановимся на решении проблемы поиска устройства хранения точного времени. Одним из таких устройств, пригодных для съёмки ИСЗ, может выступать электронный секундомер.
Электронный секундомер можно запустить в определённый момент времени от внешнего источника точного времени. Используя возможность ставить временные метки на секундомере, можно осуществить фиксацию моментов времени интересующего нас события (начала экспозиции съёмки ИСЗ и т.д.). При этом время наступления события tevent определяется выражением:
где t0 - время запуска секундомера, tm - значение метки времени.
Запуск секундомера можно производить как вручную, так и от ПК. Рассмотрим оба варианта.
Запуск секундомера вручную
Пусть имеем ПК, системные часы которого синхронизированы с NTP-сервером. Ошибка синхронизации ?NTP в среднем составляет 1-5 мс (см. рис. 3). Секундомер можно запустить вручную, следя за изменением секундных разрядов в основном окне программы "Dimension 4" (см. рис. 6).
 |
Не смотря на то, что типичная скорость реакции человека на визуальный эффект составляет 0,1-0,3 с (см. Приложение Б) (что приводит к появлению задержки синхронизации εvis – т.н. "собственное уравнение"), экран монитора тоже имеет свою задержку обновления – т.к. частота обновления изображения на мониторе лежит в пределах 60-100 Гц, то задержка отображения εэ на экране может достигать 0,010-0,017 с. Таким образом, общая задержка запуска секундомера в фиксированный момент времени будет равна:
Типичные значения ошибки синхронизации по NTP-серверу составляют σNTP = ±10 мс, разброс скорости реакции на визуальный раздражитель σvis = ±100 мс, разброс задержки обновления экрана σэ = ±6 мс.
Подставляя типичные значения задержек (εvis = 300 мс, εэ = 15 мс), получаем, что общая ошибка равна ≈300 мс, т.е. основная ошибка запуска секундомера вносится человеком.
Снизить ошибку реакции зрения можно тренировкой (см. Приложение В). Особенно эффективно использование визуально-звуковых сигналов. Для этого нужно использовать звуковую сигнализацию наступления каждой новой секунды системных часов ПК. Для этого можно использовать программу "LPT Syncronizer" Алексея Ткаченко [7] (см. рис. 7).
 |
После запуска программы, она считывает показания системных часов и выдаёт короткий звуковой сигнал (длительностью 50 мс) в линейный выход (Line-Out) звуковой карты ПК с наступлением каждой новой секунды. Таким образом, можно одновременно смотреть на значение времени в окне программы "Dimension 4" и слышать сигнал о наступлении новой секунды (см. рис. 8).
 |
Метод ручного запуска секундомера прост, но достичь точности запуска секундомера менее 0,1-0,2 с проблематично. Гораздо точнее можно запустить секундомер от ПК.
[Вверх]
Запуск секундомера от ПК
Уменьшить задержку при запуске секундомера и увеличить, таким образом, точность синхронизации времени можно за счёт использования ПК. Один из способов следующий: специальная программа считывает показания системных часов, синхронизированных тем или иным способом с точным временем, и каждую минуту или секунду посылает на определённый контакт LTP-порта сигнал. Этот сигнал поступает на плату преобразователя, к которой подключён секундомер – импульс с LPT-порта запускает секундомер с задержкой, определяемой программной задержкой синхронизирующей программы и задержкой срабатывания платы преобразователя. На рис. 9 показана общая схема подключения такой системы.
 |
Программа "LPT Syncronizer" Алексея Ткаченко [7] ежесекундно посылает на контакт №2 LPT-порта сигнал, который поступает на плату преобразователя (ПП). Структурная схема устройства ПП показана на рис. 10.
 |
Блок ПП включает в себя оптрон типа 4N35 или аналогичный, и токоограничивающий резистор R на входе ПП. Сигнал на LPT-порте вызывает свечение светодиода внутри оптрона, в результате чего его свет попадает на базу биполярного транзистора оптрона, открывая транзистор. Открытие транзистора замыкает контакты запуска секундомера – секундомер запускается. Время срабатывания оптрона, согласно спецификации 4N35, не более ε4N35 = 7 мкс и в данном методе синхронизации пренебрежимо мало. Наличие оптрона диктуется необходимостью гальванической развязки LPT-порта ПК и секундомера. Кроме этого, LPT-порт относится к устройствам TTL, следовательно логическому уровню "1" соответствует напряжение +5 В, а для запуска секундомера используется напряжение +1,5 В между контактами.
Для отслеживания значения задержки времени между наступлением новой секунды и приходом сигнала синхронизации на LPT-порт программа "LPT Syncronizer" отображает значение этой задержки (см. рис. 7 - параметр "Latecy"). На рис. 11 приведены гистограмма задержек для четырёх минут работы программы. Как видно из графика, наибольшее значение задержки наступает при приходе минутных синхроимпульсов. Следовательно, синхронизировать секундомер следует не по минутным синхроимпульсам, а по секундным.
 |
[Вверх]
Распределение задержек секундных синхроимпульсов приведено на рис. 12, из которого видно, что типичное значение задержки не превышает εLPT = 10 мс. При синхронизации секундомера от LPT-порта, также как и при синхронизации системных часов ПК, требуется закрыть все лишние программы на ПК, т.к. их влияние может увеличить значение задержки прихода синхроимпульсов на LPT-порт.
 |
п.2. Использование радиосигналов точного времени РВМ
Ещё одним источником точного времени, помимо NTP-серверов и сигналов спутниковой системы GPS, являются эталонные радиосигналы времени и частоты РВМ (RWM) Государственной службы времени РФ [8]. Передатчики РВМ расположены в Менделеево, недалеко от Москвы (РФ) [9], работают на частотах 4996 кГц, 9996 кГц и 14996 кГц. Часовая программа работы РВМ представлена в Таблице 1 [8-9].
 |
[Вверх]
Сигналы времени 56, 57, 58, 59-й секунд, следующие после (5n-1)-й минуты, пропускаются (где n = 1, 2, 3, …, 12). Точность привязки сигналов РВМ к всемирному времени довольно высока – погрешность не превышает 30 мкс [8].
Сигналы РВМ, подобно 1PPS-сигналам системы GPS, можно использовать для особо точной синхронизации часов. При этом следует учитывать задержку радиосигналов от передатчика, обусловленную конечной скоростью распространения радиоволн. Радиоволны передатчиков РВМ распространяются в основном при помощи отражения от ионосферных слоёв F1 и F2 [10], расположенных на высотах 160-400 км. Наличие флуктуаций ионной концентрации (сезонная, суточная и случайная) приводят к флуктуациям высот отражения радиоволн, что ограничивает точность синхронизации до 0,3-2 мс [9].
Задержка радиосигналов РВМ от передатчика до приёмника (в миллисекундах) может быть определена по эмпирической формуле [9]:
где L – расстояние между приёмником и передатчиком, вычисленное по дуге большого круга Земли (в километрах):
где Z – центральный угол (в угловых минутах), соответствующий дуге большого круга между передатчиком и приёмником, φ1 и φ1 – широта передатчика и приёмника соответственно, Δλ - разность их долгот.
Географические координаты передатчика РВМ равны 55°43’36,73” с. ш. и 38°12’29,39” в.д. [9], таким образом, для Минска величина задержки сигналов РВМ составит εRWM = 3,2 мс.
Обладая высокой точностью, сигналы точного времени РВМ могут служить источником времени как непосредственно для синхронизации секундомера, так и для контроля точности синхронизации по NTP-серверу. При этом синхронизацию по сигналам РВМ можно выполнять как вручную, так и при помощи специальных устройств.
Синхронизация вручную
Как и в случае запуска секундомера вручную от системных часов ПК, синхронизированных по NTP-серверу (см. выше), синхронизация по сигналам РВМ производится на слух. При этом общая задержка будет зависеть в основном от скорости реакции наблюдателя на акустический сигнал εacust, которая может достигать 0,2-0,4 с:
Задержка на распространение радиосигналов РВМ от передатчика к приёмнику, как было показано выше, для Минска составляет εRWM = 3,2 мс, и является незначительной по сравнению с εacust.
Синхронизация непосредственно по сигналам РВМ
Сигналы РВМ можно использовать непосредственно для запуска секундомера. Общая структурная схема подобной синхронизации приведена на рис. 13. Радиоприёмник сигналов РВМ подсоединяется к усилитель низких частот (УНЧ), на выходе которого амплитуда секундных импульсов РВМ составляет около 5 В. Далее выход УНЧ через отсекающий диод (он нужен для отсекания составляющей сигнала, которая имеет отрицательную полярность) соединяется со ждущим мультивибратором [11]. При каждом приходе секундного импульса РВМ на выходе мультивибратора появляется прямоугольный импульс, длительность которого задаётся времязадающей цепочкой R1C1:
 |
[Вверх]
Сопротивление ограничительного резистора может находиться в пределах 1,5-20 кОм. Каждый из таких импульсов может запускать секундомер, соединённый с выходом мультивибратора через плату преобразователя (см. рис. 10).
Применение мультивибратора диктуется тем фактом, что профиль звукового секундного импульса имеет сложный "колебательный" характер, в связи с чем секундомер от подобного сигнала будет запускаться несколько раз за импульс (эффект на подобие "дребезга" контактов). Мультивибратор выдаёт на выходе прямоугольные импульсы одинаковой длительности. Задержка генерации определяется конкретным мультивибратором. В нашем случае – это К155АГ1 (иностранный аналог – SN74121N), и задержка генерации не превышает долей микросекунды. Длительность прямоугольного импульса от мультивибратора следует выбирать не менее 30-50 мс, т.к. секундомер имеет защиту от "дребезга" контактов и может не запуститься от более коротких импульсов. На рис. 14 приведены результаты моделирования поведения описанной системы на приход секундных импульсов РВМ на вход ждущего мультивибратора.
 |
В нашем случае система срабатывает по переднему фронту РВМ-импульса (длительность сигнала 100 мс). Из-за колебательного характера РВМ-импульса возможна задержка запуска мультивибратора, однако она едва ли превысит 1-2 мс.
Особое внимание следует уделить уровню шума между секундными РВМ-импульсами. Если амплитуды шумовых импульсов на выходе УНЧ будут превышать 2,4 В, мультивибратор может испытывать беспорядочные ложные срабатывания. На практике следует стремиться к тому, чтобы амплитуда шума не превышала 0,5-1 В. Это требование накладывает дополнительные ограничения на качество принимаемых сигналов РВМ, которые в условиях индустриальных городских помех сильно зашумлены (тем не менее, практика показывает, что даже в центре крупных городов на качественный приёмник и соответствующую антенну можно принимать РВМ-сигналы с отношением "сигнал/шум" порядка 14-20 дБ). Также стоит отметить не очень подходящую периодичность работы РВМ-передатчиков (секундные импульсы РВМ генерируются с 10-й по 20-ю и с 40-й по 50-ю минуты каждого часа).
п.3. Использование GPS-приёмника
В последние годы, в связи со значительным развитием и увеличением доступности средств персональной навигации на базе GPS-приёмников, возникла возможность осуществлять синхронизацию времени способом, бюджетным по затратам и непревзойдённым по точности относительно других способов. В настоящее время система спутниковой навигации GPS на базе ИСЗ NAVSTAR [12] позволяет определять любому пользователю GPS-приёмника своё местоположение на поверхности Земли, высоту над уровнем моря, скорость и направление движения. Помимо этого система GPS позволяет получать информацию о точном времени. В зависимости от требований к точности и модели GPS-приёмника, синхронизацию часов можно выполнять с точностью от 0,5 с до десятков нс.
Ниже рассмотрены способы синхронизации часов наблюдателя, наиболее востребованные при наблюдении и съёмке ИСЗ.
[Вверх]
Использование часов GPS-приёмника
Практически любой GPS-приёмник с графическим экраном включает в свои опции отображение времени. Это время, получаемое по протоколу "NMEA 0183" [13], обрабатывается процессором GPS-приёмника и отображается на экране. В качестве примера рассмотрим GPS-приёмник "Garmin eTrex H" (см. рис. 15).
 |
При синхронизации по часам GPS-приёмника приходится синхронизировать секундомер только вручную. При этом необходимо учесть следующие ошибки:
- задержка отображения изменения секундного разряда на ЖКИ-экране GPS-приёмника: εЖКИ
- Задержка реакции человека на визуальный раздражитель ("собственное уравнение") εvis
Раскадровка видеоролика, на который записывалось изображение часов на ЖКИ-экране GPS-приёмника "Garmin eTrex H", показало, что длительность формирования секундных разрядов лежит в пределах εЖКИ = 180-320 мс (при +21° С и точность измерения моментов времени ±20 мс) – в зависимости от "сложности" цифры (при изменении цифры "6" на "7", к примеру, "перерисовка" занимает большее время, чем при изменении "5" на "6'). Кроме этого, необходимо оценить точность синхронизации часов GPS-приёмника. Для этого была проведена видеозапись ЖКИ-экрана GPS-приёмника "Garmin eTrex H" на фоне окна программы "Dimension 4" на ЭЛТ-мониторе ПК. Фиксировались моменты начала изменения секундных символов часов (с точностью ±20 мс). Результаты измерений раскадровки полученного видеоролика и измерения задержки между часами GPS-приёмника и системными часами, синхронизированными по NTP-серверу www.belgim.by приведены на рис. 16.
 |
[Вверх]
При измерении были учтены следующие ошибки и задержки:
- ошибка синхронизации ПК по NTP-серверу: σNTP = 15 мс (15 %)
- ошибка за счёт задержки обновления изображения на ЭЛТ-мониторе (85 Гц): εэ = 1,18 мс (1,18 %)
- ошибка измерения при раскадровке: 20 мс (20%)
В результате, средняя задержка часов GPS-приёмника "Garmin eTrex H" от точного времени составила εGPS-clock = +100 ± 25 мс.
Следует отметить, что задержка εGPS-clock является минимальной, т.к. время "прорисовки" разрядов на ЖКИ-экране GPS-приёмника при +21° составляет 180-320 мс (среднее значение 250 мс), и наблюдатель может синхронизировать секундомер по показаниям таких часов в любой момент указанного интервала (без учёта средней задержки скорости реакции на визуальный раздражитель εvis ≈ 300 мс). Таким образом, суммарная задержка синхронизации по часам GPS-приёмника вручную может достигать 650 ± 80 мс. При этом не учтены ошибка за счёт разброса значений скорости реакции человека на визуальный раздражитель (определяется индивидуально, см. Приложение В). Учёт среднего значения разброса σvis = 100 мс даёт общую задержку 650 ± 130 мс.
Кроме этого, следует учесть, что с понижением температуры, время отклика ЖКИ-экрана значительно увеличивается (до 0,5 с и более), что ещё больше увеличивает задержку между точным временем и показаниями часов GPS-приёмника. Таким образом, синхронизация секундомера по показаниям часов GPS-приёмника имеет значительную задержку - порядка 0,5 с, разброс которой может достигать 0,05-0,2 с.
Использование данных протокола NMEA
Более точным методом синхронизации часов наблюдателя с использованием GPS-приёмника, по сравнению с синхронизацией по часам самого приёмника, является использование информации о точном времени, передаваемой самим приёмником по протоколу NMEA 0183 (описание некоторых основных параметров протокола см. в Приложении Д).
Многие современные GPS-приёмники имеют разъём для подключения к СОМ-порту (RS-232) ПК. NMEA-данные, в том числе точное время, передаётся по кабелю и могут обрабатываться специальным программным обеспечением. Стандартная схема подключения GPS-приёмника к ПК по протоколу RS-232 показана на рис. 17.
 |
Для подключения GPS-приёмнимка к СОМ-порту ПК необходимо соединить вывод №5 СОМ-порта ("GND" – "земля") с выводом "GND" GPS-приёмника, вывод №3 порта соединяется с проводом "Tx" (получение данных), а вывод №2 – с проводом "Rx".
Следует сразу отметить, что время, передаваемое по протоколу NMEA, не привязано к точному времени. Ошибка синхронизации может достигать 0,1-0,3 с.
Для синхронизации системных часов по протоколу NMEA существует множество программ, одной из которых является "GPSTime" [14]. На рис. 18 показано рабочее окно программы.
 |
После подсоединения GPS-приёмника к СОМ-порту ПК запускаем программу, заходим в пункт меню "Config", и в открывшемся окне (см. рис. 19) выбираем номер СОМ-порта, к которому подсоединён GPS-приёмник ("Port number"), скорость передачи данных ("Data rate"), указываем периодичность синхронизации системных часов ПК ("Update PC time"). В поле "Time offset" нужно указать отличие местного времени от Всемирного координатного времени (UTC). После этого нажимаем кнопку "Start". После этого начинается синхронизация системных часов ПК.
 |
[Вверх]
При использовании NMEA-данных для синхронизации системных часов ПК необходимо учитывать ошибку привязки NMTA-данных к точному времени. Для примера рассмотрим точность синхронизации системных часов ПК по протоколу NMEA по сравнению с синхронизацией про NTP-серверу. На рис. 20 представлена гистограмма распределения разности синхронизации при использовании программ "GPSTime" и "Dimension 4". Точность синхронизации по NTP-серверу не превышала 15 мс. Из гистограммы видно, что среднее значение задержки σNMEA = 0,36 ± 0,06 с.
 |
Использование GPS-приёмника с 1PPS-сигналами
Не смотря на значительную рассинхронизацию меток времени, передаваемых GPS-приёмником по протоколу NMEA, именно GPS-приёмники позволяют осуществлять синхронизацию часов наблюдателя с точным временем с точностью до 10-100 нс в пределе. Эта возможность реализовывается благодаря тому, что GPS-приёмник помимо NMEA-данных передаёт сигналы 1PPS (от англ. "1 pulse per second" – "один импульс в секунду") [15]. Секундные импульсы 1PPS с большой точностью (0,01-1 мкс – в зависимости от модели GPS-приёмника) привязаны к точному времени. Использование такой точной привязки и позволяет достигать точности синхронизации часов наблюдателя в 0,5-1 мкс.
Для примера рассмотрим GPS-приёмник "Garmin 35-HVS", фотография осциллограммы 1PPS-сигнала которого приведена на рис. 21 (технические характеристики приёмника представлены в Приложении Г). Длительность 1PPS-сигнала устанавливается пользователем в диапазоне 20-980 мс с шагом 20 мс. Амплитуда 1PPS-импульсов равна 4,5 В, период следования импульсов, заявленный в техпаспорте, равен 1 с ± 1 мкс.
 |
На рис. 22 представлена фотография осциллограммы периодичности следования 1PPS-сигналов – измерения показывают, что период равен 1 с с точностью не хуже 10 мкс. Более точные измерения периода следования 1PPS-импульсов на частотомере Ч3-63 показали, что для данного экземпляра GPS-приёмника период отклоняется от 1 с не более, чем на 0,5 мкс (ошибка измерения периода 0,05 мкс) при температуре GPS-приёмника +7° С.
 |
Учитывая, что 1PPS-сигналы имеют не только стабильный период, но и точную привязку к точному времени, эти сигналы можно использовать для запуска секундомера наблюдателя ИСЗ. Общая схема такой синхронизации показана на рис. 23. Эта схема по своей сути та же, что и при запуске секундомера от сигналов LPT-порта при использовании программы "LPTSync" (см. рис. 9). В этом случае соединение 1PPS-выхода GPS-приёмника и секундомера также осуществляется посредством платы преобразователя на основе оптрона 4N35.
При такой синхронизации и последующем использовании секундомера в наблюдениях ИСЗ следует учитывать задержку срабатывания оптрона, которой в этом случае уже нельзя пренебрегать: ε4N35 = 7 мкс (согласно данным спецификации оптрона 4N35). Как указывалось выше, паспортная точность периода 1PPS-сигналов равна 1 мкс.
 |
Как видно из сравнения способов синхронизации часов наблюдателя, синхронизация с использованием 1PPS-сигналов является одной из наиболее точных. Ошибка синхронизации не превышает 10 мкс.
[Вверх]
п.4. Контроль точности синхронизации системных часов ПК
При использовании того или иного метода синхронизации часов наблюдателя необходимо контролировать точность синхронизации. На практике наиболее часто используется синхронизация от системных часов ПК. Ниже рассмотрены способы контроля такой синхронизации при использовании NTP-серверов с контролем по РВМ-сигналам и 1PPS-сигналам.
Контроль точности синхронизации системных часов ПК по NTP-серверу
Принцип синхронизации системных часов ПК по NTP-серверам описан выше. Для проверки точности подобной синхронизации можно осуществлять сверку с данными о точном времени, полученными по декодированию РВМ-сигналов. Для этого можно использовать программы, подобные "RadioClock" [16].
Программа "RadioClock" является платной, однако её trial-версию вполне можно использовать для контроля точности синхронизации по NTP-серверу. При этом программа не корректирует системное время, а лишь отображает разницу между текущим системным временем и точным временем, полученным при декодировании РВМ-сигналов. На рис. 24 схематически показано подключение радиоприёмника сигналов РВМ для проверки точности синхронизации по NTP-серверу с использованием программ "Dimension 4" и "RadioClock". В качестве приёмника радиосигналов РВМ использовался сканирующий приёмник YAESU VR500, который при помощи аудиокабеля Jack-3.5 "папа-папа" (см. рис. 25) подсоединяется к Line-In-входу звуковой карты ПК, в результате чего на вход звуковой карты начинают поступать сигналы РВМ. Затем синхронизируем системные часы ПК по NTP-серверу при помощи программы "Dimension 4".
 |
 |
Далее запускаем программу "RadioClock" (см. рис. 26). В пункте меню "Transmitter" выбираем "RWM (Moscow)". Подстраивая частоту приёма, добиваемся того, чтобы метки времени на FFT-спектрограмме программы проходили между двумя вертикальными красными линиями в крайней правой части спектрограммы. После этого программа начнёт декодировать РВМ-сигналы. Дождавшись первой синхронизации, наблюдаем за окнами "Syn" – время по данным РВМ, и "PC" – системное время ПК.
 |
[Вверх]
После нескольких минут синхронизации можно визуально оценить точность синхронизации. Раскадровка видеоролика с записью изменения значений в полях "Syn" и "PC" показала, что при ошибке синхронизации по NTP-серверу не более 10 мс (по данным программы "Dimension 4"), разность показаний системного времени и времени по данным декодирования РВМ имеют заметный разброс (см. рис. 27). Точность измерения задержки – 20 мс. Как видно из графика, среднее значение задержки равно εD4-RC = 70 мс ± 40 мс. Следует отметить, что такое значение задержки обусловлено как скоростью механизма синхронизации системных часов программой "Dimension 4", так и скоростью декодирования РВМ-сигналов программой "RadioClock". Задержка обновления экрана монитора εэ = 12 мс, задержка распространения РВМ-сигнала до Минска, вычисленная по формуле (3), равна εRWM = 3,2 мс.
 |
Таким образом, использовать программу “RadioClock” можно для визуального контроля точности NTP-синхронизации системных часов ПК относительно меток времени РВМ.
В заключение пункта рассмотрим задержку между точным временем и приходом синхронизирующего импульса на LPT-порт при работе программы "LTPSync". На рис. 28 показана структурная схема и амплитудно-временные спектры синхронизирующих сигналов от программы "LPTSync" относительно РВМ-сигналов. Суть эксперимента в следующем:
- системные часы ПК синхронизируются с NTP-сервером посредством программы "Dimension 4"
- запускается программа "LTPSync", которая выдаёт звуковые импульсы в линейный выход (Line-Out) выход звуковой карты ПК при наступлении каждой новой секунды
- линейный выход звуковой карты ПК соединяется с линейным входом (Line-In) звуковой карты ПК, причём только с его левым каналом (L)
- на правый канал (R) линейного входа (Line-In) звуковой карты ПК запускается аудио-сигнал от радиоприёмника РВМ-сигналов
 |
Таким образом, на линейный вход звуковой карты ПК поступает сразу два сигнала – на правый канал поступают секундные метки РВМ, а на левый – секундные импульсы от программы "LTPSync". Далее записываем звук со звуковой карты любой программой звуковым редактором (например, "AudaCity" [17]), и измеряем задержку между РВМ-сигналами и секундным метками "LTPSync" путём установления ползунка выделения фрагмента звукозаписи и последующего его передвижения до нужной позиции.
Измерения показали, что при точности синхронизации системных часов по NTP-серверу не хуже 10 мс (по данным программы "Dimension 4"), рассогласование между временем прихода РВМ-сигналов и генерированием сигналов программой "LTPSync" не превышают 60 мс, а наиболее вероятное значение лежит в границах 20 мс. Эти данные не сходятся со случаем оценки точности синхронизации с использованием программы "RadioClock" (см. рис. 27), однако это можно объяснить несовершенством алгоритма декодирования программы, а также задержкой на декодирование.
Отметим также, что используя двухканальный осциллограф можно реализовать экспресс-анализ точности синхронизации по NTP-серверу. Для этого на один из каналов подаются сигналы РВМ, а на второй – сигналы синхронизации с LPT-порта от программы "LTPSync". Выводя оба канала на экран можно визуально отслеживать точность синхронизации с ошибкой не хуже 2-3 мс.
[Вверх]
Контроль точности синхронизации системных часов ПК по 1PPS-сигналу
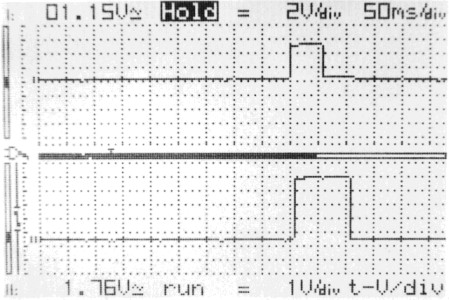
Использование сигналов 1PPS GPS-приёмника позволяет осуществлять контроль точности синхронизации системных часов с точностью порядка 1 мкс. На рис. 29 представлена фотография осциллограммы 1PPS-сигналов в сравнении с синхросигналами LPT-порта при использовании программы "LPTSync" при синхронизации системных часов по NTP-серверу. На рис. 30 представлена более подробная осциллограмма. Как видно, синхроимпульсы с LPT-порта опережают на 1,6 мс 1PPS-сигналы.
 |
 |
Следует отметить, что синхроимпульсы LPT-порта могут как опережать 1PPS-сигналы, так и отставать от них по времени. На рис. 31 представлены гистограммы распределения задержек между LPT-импульсами и 1PPS-импульсами с учётом знака запаздывания и по абсолютному значению задержки.
 |
[Вверх]
Как видно из графиков, прослеживаются два максимума для задержек синхронизации – "пик запаздывания" ε-1PPS-NTP = -9,7 ± 4,9 мс, и "пик опережения" ε+1PPS-NTP = 4,3 ± 2,3 мс. Абсолютное значение задержки LTP-импульсов относительно 1PPS-сигналов равно ε1PPS-NTP = 7,0 ± 4,9 мс.
Использование 1PPS-сигналов GPS-приёмника позволяет определить задержку на распространения РВМ-сигнала до Минска. Согласно формуле (3) эта задержка εRWM = 3,21 мс. Использование двулучевого осциллографа позволяет определить эту задержку: на один канал заводится 1PPS-сигнал, а на второй – РВМ-сигнал с НЧ-выхода радиоприёмника. На рис. 32 показана осциллограмма сигналов РВМ относительно 1PPS-сигналов GPS-приёмника. Измеренное значение задержки РВМ-сигнала составляет 3,33 ± 0,01 мс, что на 3,6% больше значения, рассчитанного по формуле (3).
 |
Отличие измеренного значения от вычисленного объясняется как ошибкой эмпирической формулы (3), так и задержкой в обработке РВМ-сигналов радиоприёмником.
Ещё одним не маловажным моментом является точность хранения времени системными часами ПК. На рис. 33 показан график ухода системных часов ПК относительно 1PPS-сигналов (секундные метки системных часов генерировались программой "LPTSync", сигналы снимались с LPT-порта). При измерении синхронизация системных часов выполнялась по NTP-серверу с точностью не хуже 10 мс (по данным программы "Dimension 4"), на время измерения ухода системных часов синхронизация не выполнялась, стороннее ПО на ПК не использовалось.
 |
Линейная аппроксимация даёт значение ухода системных часов ПК 7,2 ± 2,7 мс/минуту. Эта оценка хорошо согласуется с ранее указанной величиной 5 мс/минуту при измерении ухода системных часов ПК при сравнении с данными NTP-сервера (см. рис. 4).
Отдельно следует остановиться на вопросе точности хранения времени самими часами наблюдателя. Измеренный уход времени для секундомера ЧСЭ-01 при +8° С составил 0,660 ± 0,010 мс/минуту (для запуска и остановки секундомера использовались синхросигналы LPT-порта от программы "LPTSync", точность NTP-синхронизации не превышала 10 мс, точность определения моментов времени по секундомеру 5 мс), что на порядок стабильнее системных часов ПК.
[Вверх]
§ 2. Точность фиксаций моментов начала и конца экспозиции
В предыдущем параграфе мы рассмотрели вопрос получения и хранения точного времени. Теперь настало время разобраться, как производить точную фиксацию моментов времени и привязку к точному времени. Ниже приведено описание двух методов, применимых при съёмке ИСЗ DSLR-камерами [18] (от . англ. "digital single-lens reflex camera" – "цифровой однообъективный зеркальный фотоаппарат"), а также рассмотрен вопрос определения начала и конца экспозиции видеокадров при видеосъёмке ИСЗ.
Звуковая фиксация срабатывания затвора
Одним из методов точной фиксации моментов времени начала и конца экспозиции является фиксация звуков затвора фотоаппарата на фоне меток времени.
- На рис. 34 показан один из вариантов такой фиксации. Динамик "Д" соединён с НЧ-выходом радиоприёмника сигналов РВМ. Сам динамик крепится к корпусу фотоаппарата таким образом, чтобы его корпус соприкасался с корпусом фотоаппарата – для улучшения распространения звука. Микрофон "М" соединяется с устройством записи звука (диктофон, ПК и т.д.). Микрофон и динамик крепятся к корпусу фотоаппарата, снаружи закрываются звукопоглощающей пластиной. Радиоприёмник посылает на динамик РВМ-сигналы, которые фиксирует микрофон. При начале и конце экспозиции фотоаппарат издаёт характерные щелчки затвора, которые фиксируются на звукозаписи в виде всплесков интенсивности звука на фоне меток РВМ (см. рис. 35). Такой метод имеет существенные недостатки, связанные с тем, что метки РВМ и звуки затвора накладываются друг на друга, кроме того не всегда возможно подобрать соизмеримый уровень интенсивности звуков затвора и РВМ-сигналов. Наличие блока преобразования звука "НЧ-выход приёмника - динамик - микрофон" могут значительно ухудшать качество записи.

Рис. 34. Схема фиксации моментов начала и конца экспозиции на фоне меток времени РВМ. "М" – микрофон, "Д" – динамик, "Ф" – фотоаппарат (вид со стороны ЖКИ-экрана), "RWM" – радиоприёмник.

Рис. 35. Временная развёртка звукозаписи срабатывания затвора фотоаппарата "Canon 350D" на фоне меток РВМ, сделанная в программе "AudaCity". Вверху ось времени (в секундах). Альтернативным вариантом является метод записи стереозвука, когда на один канал подаются метки РВМ, а не второй – звуки затвора от микрофона (см. рис. 36). Этот метод удобнее тем, что взаимная интенсивность меток РВМ и звуков затвора не так важна, кроме того эти два сигнала не накладываются друг на друга, а разделены по разным каналам, что не мешает выполнять привязку к меткам (пример см. на рис. 28, на котором показан пример подобного поканального разделения).

Рис. 36. Запись стереосигнала "РВМ+звуки затвора". "L" – левый канал звука, "R" – правый канал. [Вверх]
Общим недостатком описанных двух методов является само использование РВМ-сигналов в качестве меток времени. РВМ-сигналы с периодом 1 с испускаются только с 10-й по 20-ю минуты и с 40-й по 50-ю минуты каждого часа (см. Таблицу 1). Метки частотой 10 Гц, как правило, более зашумленные и с ними тяжелее выполнять привязку. Тем не менее, метки РВМ не излучаются с начала часа до 10-й минуты и с 30-й до 40-й минуты каждого часа, т.е. 30% времени, что не всегда приемлемо при съёмке ИСЗ. Этого недостатка лишены методы звуковой фиксации на основе использования 1PPS-сигналов GPS-приёмника (см. рис. 37).
Рис. 37. Использование звукового пьезо-излучателя постоянного напряжения ("BZ"), запускаемого от 1PPS-сигнала GPS-приёмника. -
Этот метод с использованием 1PPS-сигналов сходен с методом "а", изображённым на рис. 36. 1PPS-выход GPS-приёмника соединяется с базой биполярного транзистора (см. рис. 37). К коллектору и эмиттеру транзистора приложено постоянное напряжение, на которое рассчитан пьезокерамический излучатель "BZ" ("buzzer" в англоязычной литературе) и транзистор. Пока на базе транзистора не появится напряжение, транзистор заперт, и ток через "BZ" не течёт. С приходом 1PPS-сигнала транзистор открывается, и пьезокерамический излучатель начинает испускать характерные пищащие звуки длительностью, равной длительности 1PPS-сигнала. Громкость звука можно регулировать, если в цепь питания пьезокерамического излучателя вставить переменный резистор.
Часто бывает удобно регулировать не только уровень громкости меток времени, но и их частоту. Для этого можно использовать схему [19], изображённую на рис. 38.
Рис. 38. Использование таймера NE555 для создания источника меток на основе 1PPS-сигналов с регулируемым уровнем громкости и частоты звучания. НЧ-генератор собран на основе таймера NE555. Уровень тона сигнала регулируется резистором "R1" (чем больше сопротивление, тем ниже тон меток времени), громкость – резистором "R2" (чем больше сопротивление, тем громче сигнал). Генератор запускается с приходом каждого 1PPS-сигнала. Наличие микросхемы приводит к большей задержке сигнала, чем при использовании одного транзистора, однако характерные времена срабатывания таймера лежат в пределе единиц микросекунд, что на 2-3 порядка меньше, чем точность, с которой можно произвести привязку звуковых сигналов к меткам точного времени.

Рассмотрим более подробно структуру записываемых звуков затвора фотоаппарата. На рис. 39 показана общая структура звуков затвора цифро-зеркального фотоаппарата "Canon 350D" в режиме преподнятия зеркала (запись и измерения параметров звуковых сигналов производилась в программе "AudaCity" [17]). В этом режиме работа затвора при съёмке проходит следующим образом:
- после нажатия кнопки спуска затвора фотоаппарат посылает сигнал на встроенный электромагнит и зеркало, перенаправляющее световой поток из объектива в видеоискатель фотоаппарата, подымается, освобождая путь для светового потока на матрицу;
- после повторного нажатия кнопки спуска затвора непрозрачные шторки, закрывающие матрицу, открываются – с этого момента начинается экспозиция;
- по окончании экспозиции (выставленные в настройках самого фотоаппарата или определяемая наблюдателем самостоятельно) шторки закрываются – экспозиция закончена;
- зеркало автоматически возвращается в первоначальное положение;
 |
[Вверх]
На рис. 40 показана структура звука подъёма шторок. Начальный участок, возможно, связан с движением шторки, которое сменяется резким всплеском звука – удар шторки об опору, который постепенно затухает. Как видно, удар шторки проявляется довольно явно. Из проведённых экспериментов следует, что время открытия шторок затвора не превышает 5 мс (см. ниже).
 |
На рис. 41 показана структура звуков закрытия шторок и опускания зеркала фотоаппарата "Canon 350D". Опять же отчётливо виден момент удара шторок об опору, за которым следует продолжительный звук опускания зеркала камеры.
 |
Использование режима преподъёма зеркала предпочтительнее обычного режима (при котором шторки открываются автоматически сразу после подъёма зеркала), т.к довольно массивное зеркало создаёт заметные вибрации при своём подъёме, что может привести к размытию изображений звёзд – при преподъёме до открытия шторок вибрации успевают угаснуть за 3-5 с. Вибрации от подъёма лёгких шторок не оказывают влияния на изображение. Для исключения вибраций от нажатия кнопки спуска следует использовать дистанционный кабель с кнопкой спуска, подключаемый к камере.
Точность фиксации временной структуры звуковых сигналов в программе "AudaCity" составляет 1 мс. За счёт наличия шумов и осциллирующей структуры звуковых сигналов добиться большей точности фиксации начала и конца экспозиции на практике является проблематичным. Методы звуковой фиксации неудобны тем, что весьма чувствительны к акустическим шумам, привязка начала и конца экспозиции к меткам времени требует записи и последующей обработки звукозаписи в специальных звуковых программах-редакторах. Тем не менее, метод позволяет фиксировать моменты начала и конца экспозиции с точностью до 1-2 мс с привязкой к точному времени.
В заключение пункта следует рассмотреть вопрос реальной длительности экспозиции при использовании предустановленных выдержек в меню DSLR-камер. Для примера рассмотрим цифро-зеркальный фотоаппарат "Sony A200". На рис. 42 показана гистограмма распределения реальных длительностей 10-секундный экспозиций, измеренная по звукам затвора на фоне меток времени 1 Гц в программе "AudaCity" по методике "а". Среднее значение равно 10,43 ± 0,03 с. Для предустановленной выдержки в 30 с реальная длительность экспозиции составила 32,19 ± 0,05 с.
 |
[Вверх]
Таким образом, реальная длительность экспозиции заметно отличается от предустановленной в настройках DSLR-камеры. Как видно, этот эффект проявляется тем заметнее, чем больше длительность выдержки. На практике при съёмке ИСЗ длительность экспозиции обычно не превышает 0,5-1 с. Проведённые измерения показали, что реальная длительность экспозиции при предустановленной выдержке 1 с на DSLR-камерах не превышает 1 с более, чем на 5 мс (см. ниже). Впрочем, при съёмке ИСЗ обычно представляет интерес информация о координатах и времени начала трека ИСЗ на снимках, время же окончания трека как и его координаты не столь важны.
Использование разъёма фотовспышки DSLR-камер
Методы определения моментов времени начала и конца экспозиции, описанные в предыдущем пункте, на практике не очень удобны, особенно в плане обработки. При съёмке ИСЗ за один пролёт фиксируется 10-15 точек вдоль трека, и время, необходимое для осуществления привязки каждого кадра к точному времени по звукам затвора довольно велико. Более удобные является метод использования разъёма фотовспышки DSLR-камер.
Разъём фотовспышки, размещённый на верхней поверхности корпуса камеры, позволяет определять моменты начала экспозиции с точностью не хуже 5 мс. Величина эта была измерена в ходе проведения следующего эксперимента (см. рис. 43).
 |
На измерительный стенд помещалась DSLR-камера (1) со снятым объективом. Напротив DSLR-камеры размещалась видеокамера "VSC-751-USB" [20] (4) с объективом "Метеор 5-1" (5) (1,9/17÷69) с изменяемым фокусным расстоянием от 17 мм до 69 мм. Расстояние между камерами и фокус подбирались таким образом, чтобы получить чёткое изображение области матрицы. Видеосигнал записывался на ПК, подсоединённый к камере (4). Светодиод (3) подсоединялся к источнику питания через разъём фотовспышки DSLR-камеры. Диод располагался в тени экрана (2) от внешнего источника освещения для увеличения контраста. Суть измерений сводилась к следующему: при спуске затвора шторка DSLR-камеры поднималась, и в этот же момент замыкался разъём фотовспышки – светодиод начинал светиться в течение всей длительности экспозиции. Основная задача состояла в измерении задержки между поднятием шторки и началом свечения светодиода. На рис. 44 показаны фотографии основных блоков и узлов измерительной установки.
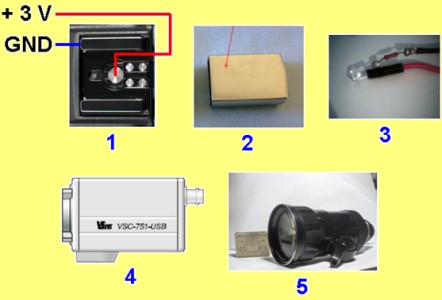 |
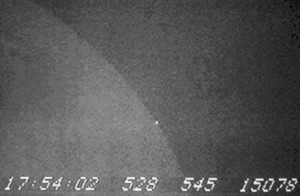
Для измерений камера VSC-751-USB (4) настраивалась на режим съёмки видео с частотой 200 кадров в секунду (разница во времени между кадрами 1/200 с = 5 мс). Затем записанный видеоролик подвергался раскадровке и анализу. На рис. 45 показаны два последовательных кадра видео-ролика, на которых видно, что светодиод начинает светиться не позже, чем через 5 мс после открытия шторки (для контроля факт открытия шторки отмечался по появлению на кадре светлой детали, находящейся позади шторки).
 |
[Вверх]
В ходе проведения многократных испытаний было выяснено, что не зависимо от значения предустановленной выдержки (1 с, 10 с, 30 с, бесконечная выдержка) разъём фотовспышки замыкается не позднее чем через 5 мс после открытия шторки. Определение этой задержки с большей точностью не представлялось возможным в силу технических ограничений видеокамеры "VSC-751-USB".
Отдельно были проведены измерения реальной длительности экспозиции при предустановленной выдержке 1 с. Раскадровка записанных видео-записей и последующие измерения показали, что реальная выдержка в этом случае не превышала 1 с более чем на 5 мс.
После этого был создан блок съёмки ИСЗ, схема которого показана на рис. 46.
 |
Для запуска секундомера используется один из методов, описанный в §1. Затем, при съёмке ИСЗ разъём меток времени секундомера соединяется с разъёмом фотовспышки DSLR-камеры при помощи специальной контактной пластины (см. рис. 47). При начале экспозиции, в момент подъёма шторки камеры, контакты разъёма фотовспышки замыкаются, одновременно замыкая контакты разъёма меток времени секундомера – секундомер ставит метку времени.
 |
Знание времени начала экспозиции само по себе не информативно, т.к. необходима привязка фиксируемых моментов времени к точному времени. Для этого необходимо запустить секундомер в точно фиксированный момент времени. В качестве такого синхронизатора запуска секундомера был создан блок синхронизации на основе схемы [19] с некоторыми изменениями. Схема блока синхронизации представлена на рис. 48.
 |
К источнику питания через фильтрующий электролитический конденсатор ёмкостью 10 мкФ и защитный диод подсоединяется GPS-приёмник "Garmin 35HVS" (см. рис. 49). Выходы Tx и Rx GPS-приёмника соединяются с 4 и 3 пинами COM-разъёма ПК соответственно, 1PPS-сигнал заводится на 6 пин COM-порта, а пины 7 и 8 замыкаются.
 |
Используя программу "SatK" [21] блок синхронизации позволяет синхронизировать системные часы ПК без использования NTP-серверов. Через ключ S1 сигнал 1PPS выводится на разъём "Jack-3.5". Для звуковой и визуальной сигнализации используется пьезокерамический звуковой излучатель BZ, который начинает излучать звуковые колебания при подаче на него постоянного напряжения. Светодиод, служащий визуальным сигнализатором 1PPS-сигналов, включен параллельно BZ. 1PPS-сигналы заводятся на базу БП-транзистора, коллектор которого соединён с BZ. Прямоугольные импульсы 1PPS открывают транзистор, в результате чего ток начинает питать BZ и светодиод на время, равное длительности 1PPS-сигнала. На рис. 50 показан тестовый вариант блока синхронизации, а на рис. 51 - описание лицевой панели блока синхронизации.
[Вверх]
 |
Работа блока синхронизации осуществляется следующим образом: включение питания - тумблером "3". Подача питания сигнализируется свечением светодиода "9". После того, как GPS найдёт 4 спутника, он начнёт выдавать 1PPS-сигнал, в результате чего начинает мигать светодиод "8", а звуковой индикатор BZ начинает издавать звуковые сигналы синхронно с 1PPS-сигналами. В гнездо "Jack-3.5" вставляются два провода от запуска секундомера.
 |
Синхронизация происходит следующим образом: наблюдатель смотрит на часы, синхронизированные с точностью до секунды с точным временем. Допустим, запустить секундомер нужно в 22ч00м00с. Каждую секунду мигает светодиод "8" и издаётся короткий звуковой сигнал. В 21ч59м59с, после сигнализации о наступлении 59-й секунды, нажимаем и удерживаем кнопку "7" - следующая секунда (в 22ч00м00с) запустит секундомер с привязкой к точному времени не хуже нескольких сот микросекунд. Важно отпустить кнопку до наступления следующей секунды, иначе секундомер остановится.
Использование 1PPS-сигналов при видеосъёмке
При видеосъёмке ИСЗ возникает задача определения начала экспозиции каждого из кадров в видеозаписи. На практике для этого используются встраиваемые в каждый кадр титры с точным временем (см. рис. 48).
 |
Для генерирования титр точного времени применяются специальные устройства – генераторы титр времени ("VTI" – от англ. "Video Time Inserter") [23]. Информация о точном времени поступает в VTI от GPS-приёмника (по протоколу NMEA), высокая точность привязки ко времени достигается за счёт привязки начала и конца кадра к 1PPS-сигналам. Видеосигнал от камеры поступает на VTI, которая в каждый кадр впечатывает титры точного времени (значение всемирного времени с точностью до 1 с и время начала и конца экспозиции кадра с точностью 1 мс). Видео-поток с титрами времени поступает на ПК, который осуществляет запись входного потока. На рис. 49 показана общая схема видеосъёмки ИСЗ с использованием титр точного времени.
 |
Астрометрия ИСЗ осуществляется для отдельных кадров, информация о времени начала экспозиции берётся из титра астрометрируемого кадра.
[Вверх]
Выводы
Подведём итоги обзора методов синхронизации часов наблюдателя и методов фиксации начала и конца экспозиции снимков. В таблице 2 приведены сводные характеристики описанных методов синхронизации часов наблюдателя, а в таблице 3 – точность методов фиксации начала экспозиции кадра при съёмке ИСЗ.
 |
 |
В зависимости от требований, предъявляемых к точности фиксации моментов времени при съёмке ИСЗ, описанные методы позволяют фиксировать моменты начала экспозиции кадров с точностью до 1-5 мс с точностью привязки ко всемирному времени до 10 мкс.
[Вверх]
© BelAstro.Net, Lupus, 25.06.2011